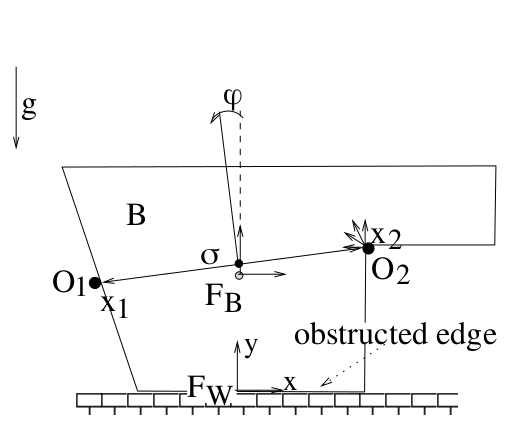
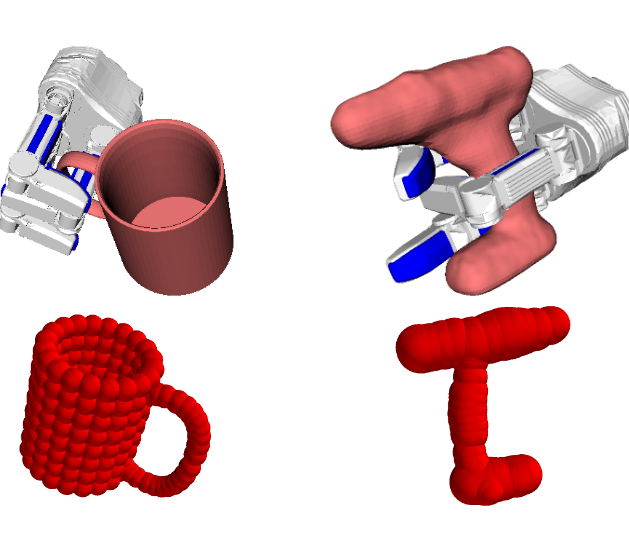
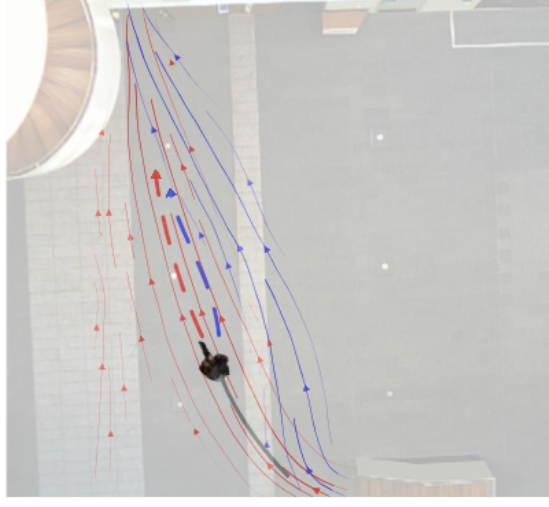
Welcome
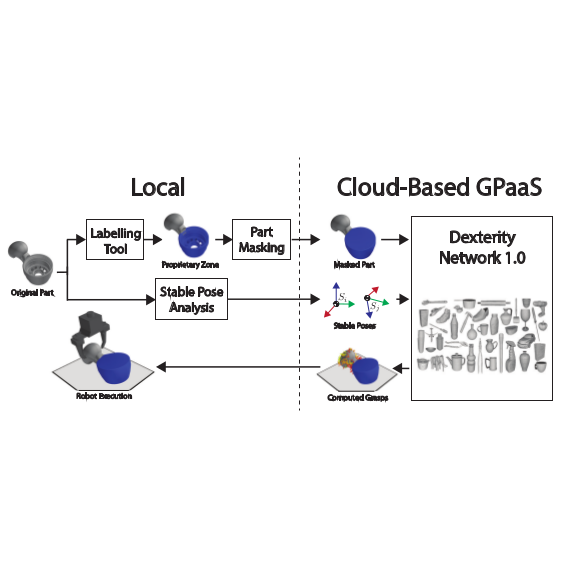
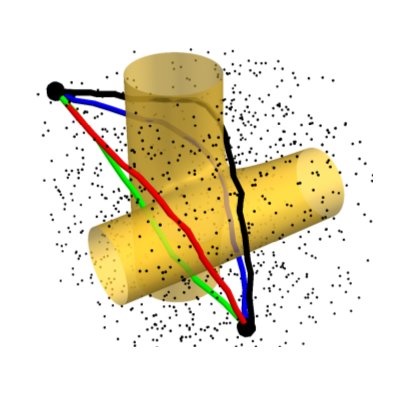
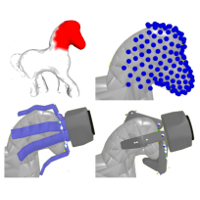
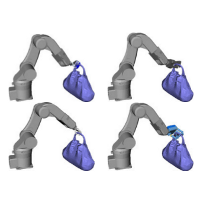
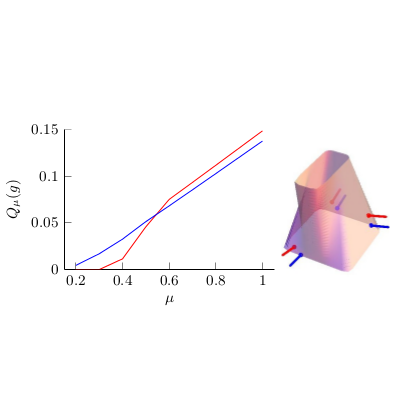
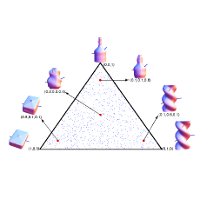
My group's research focusses on data-driven methods for robotic manipulation. Our recent interests include the understanding of training data requirements and transfer learning for training machine learning methods for robotic manipulation at scale and challenges in applying cloud robotics as a paradigm for robotic manipulation. Our work utilizes both state of the art deep learning and data-driven geometric and topological methods for reasoning about robot-object interactions, ranging from studying foundational data-driven robot manipulation primitives to complex interaction scenarios where objects are deformable or fragile.I currently coordinate two research projects along this research focus. The Horizon Europe project SoftEnable, and the WASP funded Swedish excellent research environment (NEST) grant "Intelligent Cloud Robotics for Real-Time Manipulation at Scale". My group furthermore is funded by additional grants from WASP as well as the Knut and Alice Wallenberg Foundation.