Computational Vision at CB, CSC, KTHWhat are the properties of visual patterns that make it possible to see? The intensity or colour of the light distribution that reaches the fovea or a camera sensor is strongly dependent on both the geometric relations between the objects in the world vs. the observer and on the usually unknown external illumination. Nevertheless, we perceive the world as stable and use visual perception based on brightness patterns for inferring properties of objects in the surrounding world.At our lab we perform basic research on theories and methods for computing features from image data and of using such features for deriving properties of objects or spatio-temporal events in the world. Our work concerns both the development of algorithms and concepts for computer vision and of using computational theories for modelling and explaining properties of biological vision. A main theme of our work is image representations in terms of receptive fields, which can be modelled and characterized by scale-space theory.
Invariant receptive fields under natural image transformations
Image based matching and recognition
Scale-space theory for visual operations
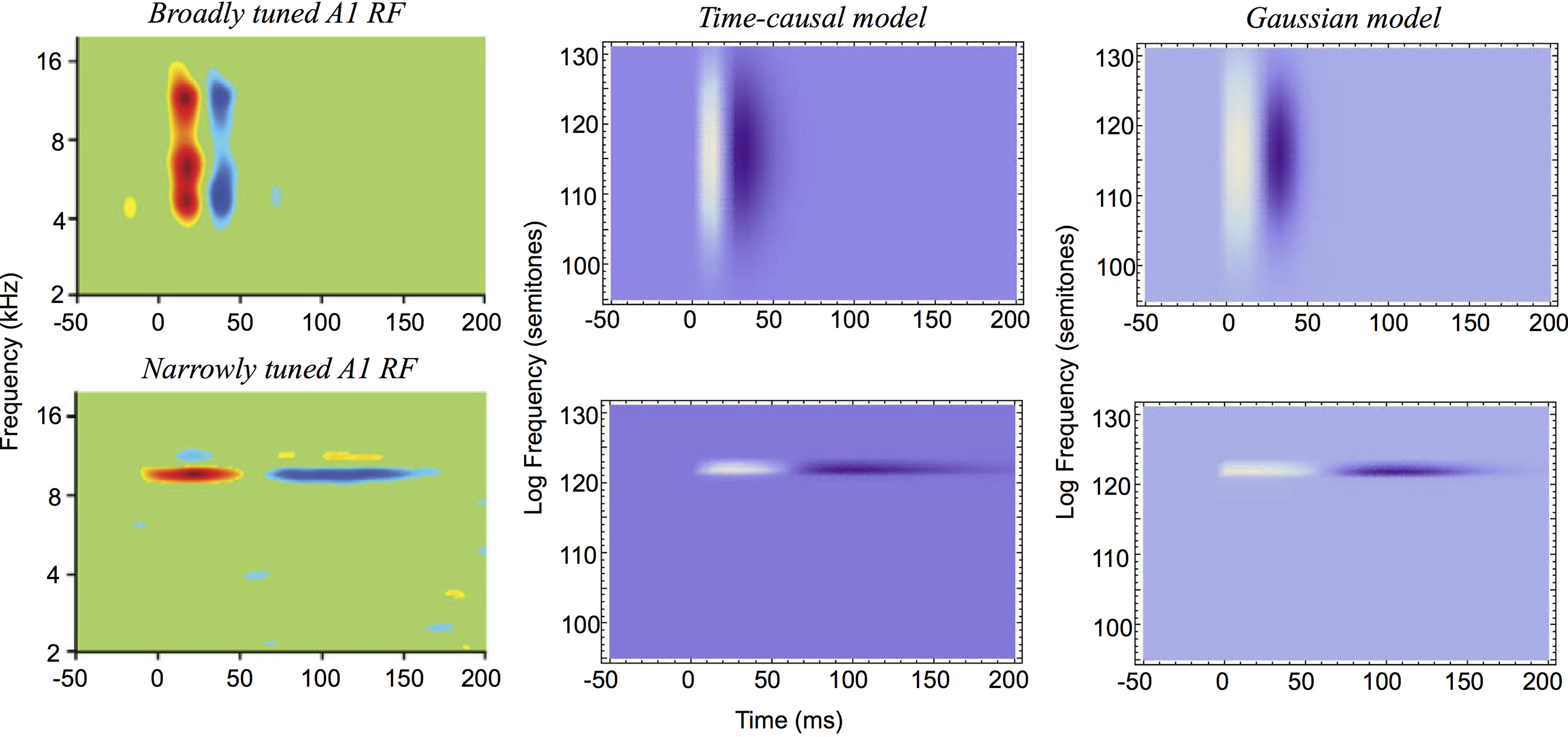
Normative theory for auditory receptive fields
|