
|
|
I am an Associate Professor and Docent at the division of Robots Perception and Learning,
at the Royal
Institute
of Technology, and the School
of Electrical Engineering and Computer Science, EECS. I was formerly a research scientist at the Massachusetts
Institute of Technology , Department of Ocean Engineering.
My research is concentrated on data fusion and world modeling for
mobile robotics,
particularly for navigation. The idea is to make machines
that
can learn how to find their way around without the need for
guidance.
To do this the robot needs to form models of the environment
suitable
to the task. That might be simply avoiding obstacles or, more
complicated
tasks like finding its way back to a location previously
visited.
These models need to be learned and refined based on the observations
made
by the robot. It is this learning that I am focused on
Current Projects:
SSF Swedish Maritime Research Center SMARC: I am one of the participants. The project is lead by KTH and has partners SAAB Dynamic, SAAB Kockoms, MMT, University of Gothenburg and Stockholm University. We will advance underwater autonomy in Blue Growth industries, Environmental monitoring, and security.
Wallenberg AI, Autonomous Systems and Software Program (WASP): Our part here is tied to SMaRC and involves using Deep Neural nets to learn latent representations of sidescan sonar data for SLAM.
VINNOVA Project IQPilot: I am a participant along Scania, Ericsson, and Autoliv. The goal is autonomous driving of city busses.
Recent Past Projects:
EU Integrated Project CENTAURO: I am one of the participants of the consortium of 6 universities. The project is development of a unique rescue robot.
EU Integrated Project STRANDS: A consortium of 6 universities and two industrial partners. We worked on the problem of long term learning by robots in real world settings.
VINNOVA Project IQMatic: A consortium of KTH, Linköping University, Scania, SAAB, and Autoliv. The goal was autonomous driving of tracktor trailer trucks.
Current Teaching:
EL2320/EL3320 Applied Estimation, (Master/PhD. Level) 7.5 hp
DD3354 Topics in Robotics, Probabilistic Graphical Models, (PhD. Level) 6.0 hp
Current PhD Students:
Yiping Xei, Main Supervisor
Ignacio Torroba Balmori, Main Supervisor
Joonatan Mänttäri, Main Supervisor
Özer Özkahraman, Co-Supervisor
Christopher Sprague, Co-Supervisor
Jiexiong Tang, Co-Supervisor
Xi Chen, Co-Supervisor
Akshaya Thippur Sridatta, Co-Supervisor<
Past, Inactive and nearly done PhD Students:
Nils Bore, Main Supervisor, (20180119) "Object Instance Detection and Dynamics Modelling in a Long-Term Mobile Robot Context'"
Eric Ward, Main Superviso (2018) "Models supporting trajectory planning in autonomous vehicles"r
Rares Ambrus, Co-Supervisor, (2017) "Unsupervised construction of 4D semantic maps in a long-term autonomy scenario"
Alper Aydemir, "Exploiting structure in man-made environments", main supervisor Patric Jensfelt,
Jacques Leedekerken, "Mapping of Complex Marine Environments using an Autonomous Surface Craft", (at MIT), supervisor John Leonard
Johan Ekekrantz, Co-Supervisor
Rasmus Göransson, Co-Supervisor
Past Master Students:
Wahlqvist, Kristian (2019) "A Comparison of Motion Priors for
EKF-SLAM in Autonomous Race
Cars"
Xie, Yiping (2019), "Machine Learning for Inferring Depth from Side-scan Sonar Images"
Yang, Yi (2019), "Automatic online Calibration between Lidar
and Camera"
Zhang, Zitao (2019), "Machine Learning for Inferring Sidescan Images from Bathymetry and AUV Pose"
Eriksson, Daneil (2019) "Underwater Change Detection by Fusing Multiple Sonar Images "
Palav Rawat (2019) "Environment Perception for Autonomous Driving : A 1/10 Scale Implementation Of Low Level Sensor Fusion Using Occupancy Grid Mapping"
Olof Forsberg (2018) "Semantic Stixels fusing
LIDAR for Scene Perception"
Maxime Vonsin Denoual (2018) "Monocular Visual Odometry for Underwater Navigation"
Yaun Gao (2018) "Surround Vision Object Detection Using Deep Learning"
Mark Hobro (2018) "Semantic Integration across Heterogeneous Databases: Finding Data Correspondences using Agglomerative Hierarchical Clustering and Artificial Neural Networks"
Albina Shilo (2018) "Detection and tracking of unknown objects on the road based on sparse LiDAR data for heavy duty vehicles"
Anchit Raghuram, (2018) "Robust Localization of RCV in
Large Scale Environment"
Letzner, Josefine (2017) "Analysis of Emergency Medical Transport Datasets using Machine Learning"
Burusa, Akshay Kumar (2017) ``Visual-Inertial Odometry for Autonomous Ground Vehicles''
Barksten, Martin (2016) "Evaluating the effect of cardinality estimates on two state-of-the-art query optimizer's selection of access method"
Kneips, Oliver, (2016) "Terrain Classification for Unmanned Ground
Vehicles in Mining Environments"
Olsson, Magnus (2016) "Behavior Trees for decision-making in Autonomous Driving"
Pérez Mejías, Carlos (2016) "Design of a telepresence interface for direct teleoperation of robots: The synergy between Virtual Reality and FreeLook Control"
Axelsson, Unnar (2015) "Using geometric primitives to render live RGB-D data in the Occulus Rift"
Pedreira Carabel, Carlos Javier (2015) "Terrain Mapping for Autonomous Vehicles"
Bruse, Andreas (2015) "Exploiting Cloud Resources For Semantic Scene Understanding On Mobile Robots"
Hedberg Mikael (2015), ``Robust, Fast, Multi-View Optical Head Tracking using LED-Markers''
Pouech, Jeremy (2015 ``Failure Detection and Classification for Industrial Robots''
Snorrason, Einar (2015) ``Robot Localization in Dynamic Environments''
\item Staniaszek, Michal (2015) ``Feature-Feature Matching For Object Retrieval in Point Clouds''
Talani, Bachir (2015) ``Lifetime Estimation of Scania Trucks Disc Brakes: A Knowledge Discovery in Databases Attempt to Model the Wear of Disc Brakes''
Trasiev, Yavor (2015) ``Performance Modeling and Simulation of Automotive Camera Sensors: An exploration of methods and techniques to simulate the behavior of lane detection cameras''
Gálvez del Postigo Fernández, Carlos (2015) ``Grid-Based Multi-Sensor Fusion for On-Road Obstacle Detection: Application to Autonomous Driving''
Gratwohl, Lucas (2014), ``Improving Autonomous Navigation by Exploiting Dynamic Elements in an Indoor Office Environment' (Co-supervisor, Patric Jensfelt was supervisor)
Goucher, Daniel (2014), ``Database optimization''
Xiao, Shuang (2014), "Learning Motion Patterns in People Tracking"
Hillnertz, Fredrik(2014), ``Incremental Self Learning Road map''
Bug, Daniel (2014), ``Occulus Rift Control of a Mobile Robot''
Bergius, Joakim (2014), ``Incremental road map generation in three dimensions''
Blanc, Hugo (2013) ``Inertial and optical hybrid head-tracking for helicopter simulators''
Del Carmen Molla Garcia, Maria (2013) ``Describing scenes by qualitative spatial relations''
Gallart Del Burgo, Adria (2013) ``Defining and evaluating qualitative spatial relations for describing desktop scenes''
Mengana, Bashar (2013)
``Path Planning for Autonomous Heavy Duty Vehicles in Unknown Environments using GraphSearch''
Hansson, Karl (2013) ``Data-Driven Analysis of the Fuel Saving Potential of Road Vehicle Platooning''
Köhl, Jesper (2013) ``Positioning Algorithm and Positioning Server for a Positioning System''
Pervez, Affan (2013)
``Movement Skill Acquisition using Imitation and Reinforcement Learning''
McCelland, Hunter (2011), "Using Negative Information in simultaneous localization and mapping" (co-supervisor at MIT, John Leonard was the 'Advisor').
Mojtahedzadeh, Rasoul (2011) ``Robot Obstacle Avoidance using the Kinect''
Rixon Fuchs, Louise, (Tracking Underwater with Sonar)
Saponara Iriarte Paniagua, Favio (2011) ``Object Recognition using the Kinect''
My background includes graduate studies in Physics at the
State University
of New York at Stonybrook, some work as a researcher at an
electronics
company in San Jose CA, and my own consulting business were
I did statistical data analysis.
I have a Bachelor Degree in physics from the City University
of New
York. And a Masters in Computer Science from the
Royal
Institute of Technology in Sweden . My masters thesis
was entitiled Projection of a Markov Process with Neural
Networks.
I defended Doctorial thesis on October 4,
2005.
Here is what the final version looks like PhD
thesis .
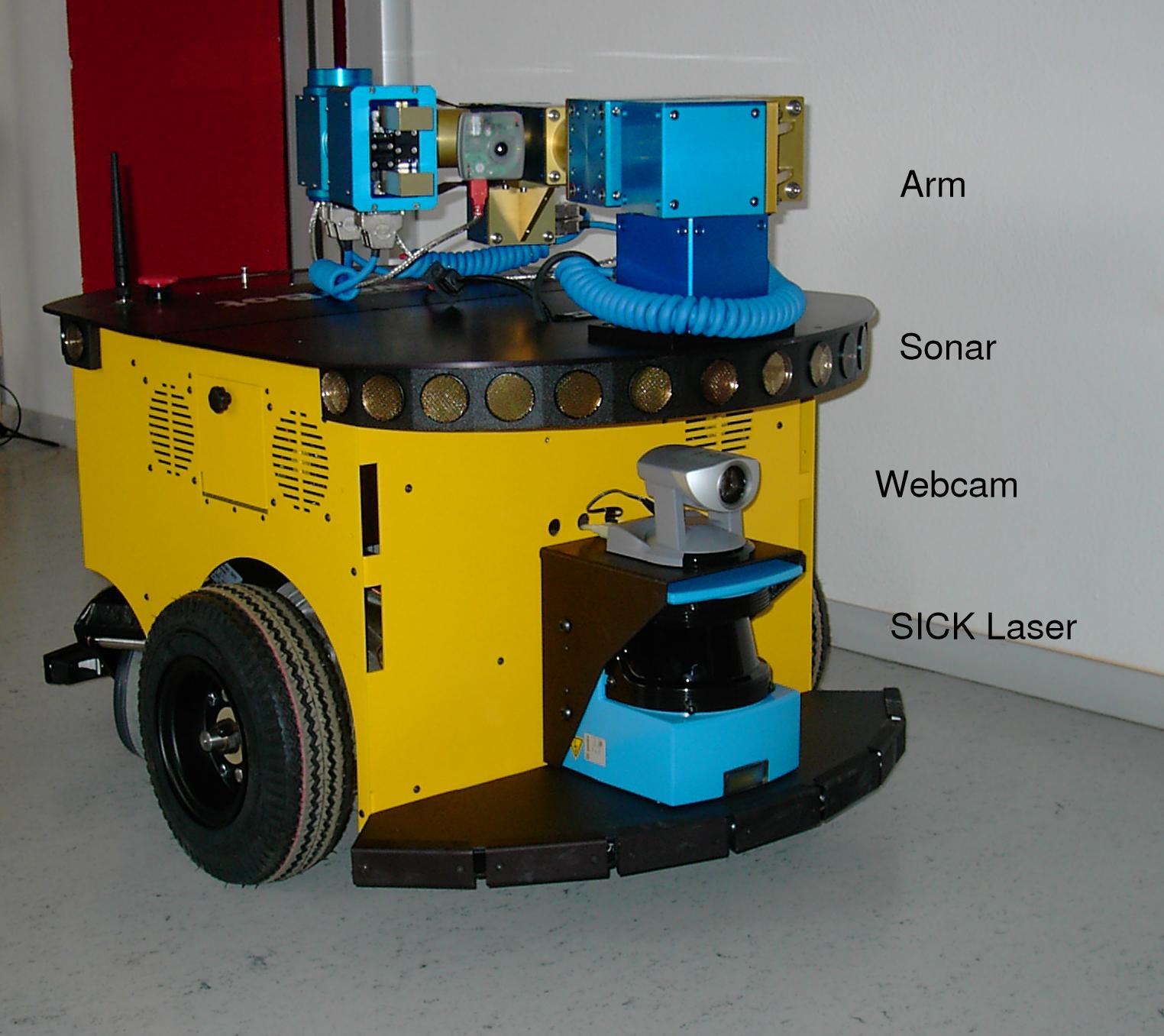
I have designed and implemented a system for our outdoor
robot,
Pluto. You can read about that here pluto.pdf
. Pluto can localize to a map to and goto a
designated coordinate avoiding obstacles along the way. Pluto can
automatically
explore and map an area using a laser range scanner to located the
walls
of buildings. The robot can also investigate a parked car:
approach it, extend its arm to position a camera to see under the car
and
then circle the car holding the camera always at the proper
angle.
Others in the lab have integrated with my system to add
road following,
person following and simple arm movements. A number of nice
user interfaces have also been developed. The work goes on but I
am no longer directly involved.
I also helped develope CURE
(CAS Unified Robot
Environment).
CURE is a collection of libraries in C++ to help people
working in the lab.
I have also worked on underwater SLAM.
Also: I play piano and have a patent for a
music keyboard related invention.
|
|
Contact
details
|
John
Folkesson.
CAS/CVAP KTH
Teknikringen 14
Stockholm, Sweden
|
|
Movies
|
|
|
|
|
Papers
|
|
|
|
|
 |
|
|
 |
|
|


|
|
|
|
